


من خلال هذه التجربة سوف نتعرف على طريقة تصميم جهاز إلكتروني لقياس مستوى المياه في الخزان باستخدام متحكم دقيق من نوع أردوينو Arduino لقراءة مستوى المياه عبر حساس يعمل بالموجات فوق الصوتية.
متطلبات المشروع
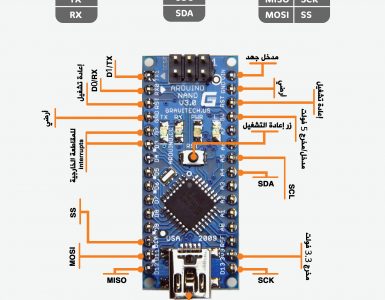
- متحكم دقيق من نوع أردوينو نانو Arduino Nano
- حساس موجات فوق صوتية HC-SR04 Ultrasonic Sensor
- لوح تجارب Breadboard
- مصابيح إل إي دي بثلاثة ألوان أحمر و أصفر وأخضر
- مجموعة أسلاك توصيل
خطوات العمل
تركيب جميع القطع السابقة حسب المخطط والخطوات التالية:
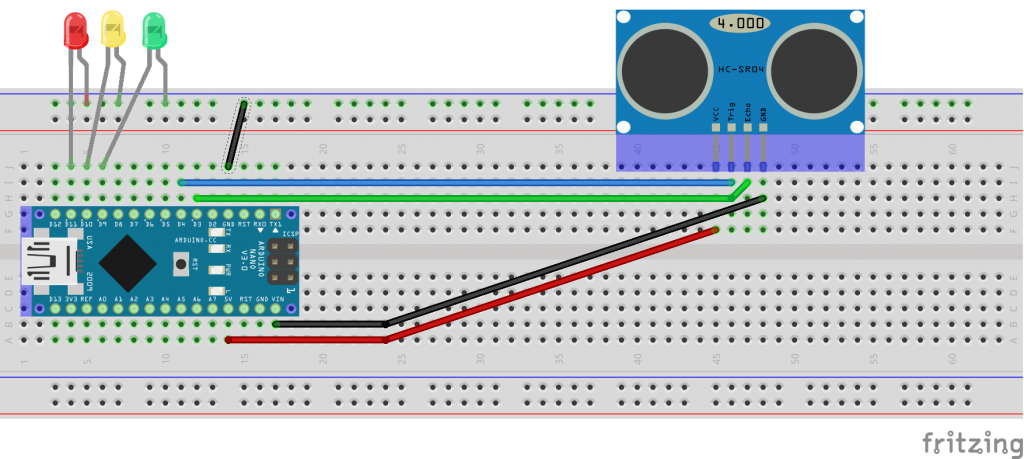
- تركيب المتحكم الدقيق على لوح التجارب بشكل طولي في الجهة اليسار على خط C و G
- تركيب حساس الموجات فوق الصوتية على المسار J
- تركيب مصابيح إل إي دي على المسار J مقابل بحيث تصبح جميع أرجل المصباح الموجبة (الرجل الطويلة للمصباح موجبة) لأرجل المتحكم الدقيق D10 و D9 و D8 وتوصيل الأرجل السالبة على المسار السالب في لوح التجارب
- توصيل رجل المتحكم الدقيق GND في نفس المسار السالب السابق في لوح التجارب
- توصيل رجل المتحكم الدقيق 5V في رجل حساس الموجات الصوتية VCC
- توصيل رجل المتحكم الدقيق GND في رجل حساس الموجات الصوتية GND
- توصيل رجل المتحكم الدقيق D4 في رجل حساس الموجات الصوتية Trig
- توصيل رجل المتحكم الدقيق D3 في رجل حساس الموجات الصوتية Echo
مخطط المشروع
برنامج المشروع
/*
* Water level project 1.0
* Arduino day 2017
* Parmg.org Group
* https://github.com/parmg/arduino-day/blob/master/water_level.ino
*
* Requirements
* 1. Breadboard
* 2. Arduino Nano v3
* 3. HC-SR04 Ultrasonic Sensor
* 4. LEDs
* 5. Cables
*
* Instructions
* 1. Install Arduino on the Breadboard
* 2. Connect Arduino 5V to Ultrasonic Sensor VCC
* 3. Connect Arduino GND to Ultrasonic Sensor GND
* 4. Connect Arduino D3 to Ultrasonic Sensor ECHO
* 5. Connect Arduino D4 to Ultrasonic Sensor TRIG
* 6. Connect Arduino GND to Breadboard Minus line
* 7. Connect Arduino D10 to long leg in LED (high level)
* 8. Connect Arduino D9 to long leg in LED (medium level)
* 9. Connect Arduino D8 to long leg in LED (low level led)
* 10. Connect All LEDs short leg to Breadboard Minus line
*
*/
#define echoPin 3 // Echo Pin
#define trigPin 4 // Trigger Pin
#define LowPin 10 // low level LED
#define MidPin 9 // medium level LED
#define HigPin 8 // high level LED
#define LowRange 10 // Low Range
#define MidRange 20 // Mid Range
#define HigRange 30 // Hi Range
long duration, distance; // Duration used to calculate distance
void setup() {
// send logs
Serial.begin (9600);
// to send soundwaves
pinMode(trigPin, OUTPUT);
// to receive soundwaves
pinMode(echoPin, INPUT);
// LEDs pins
pinMode(LowPin, OUTPUT);
pinMode(MidPin, OUTPUT);
pinMode(HigPin, OUTPUT);
}
void loop() {
/* The following trigPin/echoPin cycle is used to determine the
distance of the nearest object by bouncing soundwaves off of it. */
// stop pin
digitalWrite(trigPin, LOW);
// wait for 2ms
delayMicroseconds(2);
// send soundwaves
digitalWrite(trigPin, HIGH);
// wait for 10ms
delayMicroseconds(10);
// stop pin
digitalWrite(trigPin, LOW);
// read the soundwaves
duration = pulseIn(echoPin, HIGH);
// Calculate the distance (in cm) based on the speed of sound.
distance = duration/58.2;
if (distance > 0 and distance <= LowRange){
digitalWrite(HigPin, LOW);
digitalWrite(MidPin, LOW);
digitalWrite(LowPin, HIGH); // On
Serial.println("LowPin");
} else if (distance > LowRange and distance <= MidRange){
digitalWrite(HigPin, LOW);
digitalWrite(MidPin, HIGH); // On
digitalWrite(LowPin, LOW);
Serial.println("MidPin");
} else {
digitalWrite(HigPin, HIGH); // On
digitalWrite(MidPin, LOW);
digitalWrite(LowPin, LOW);
Serial.println("HigPin");
}
// Send the distance to the computer using Serial protocol
Serial.println(distance);
// Delay 300ms before next reading.
delay(300);
}







شكرا جزيلا لك
لكن كم مدي هذا االسنسر
وهل يصل الي 3 متر
حسب المواصفات الفنية للقطعة HC-SR04 فإنها تستطيع القياس إلى مسافة 450 سنتيميتر (4.5 متر)